2010年07月
富士五湖+αを廻る
- 2010-07-31 (Sat)
- 一般
基本的に138と139と1と246で,河口湖と西湖以外の湖は一週ずつ回ってみた.慣らしなのでゆっくり走って大体8時間.昼飯食ったり全部の湖で写真とったり忍野八海と花の都でも写真とったけど.そして東富士五湖道路でETCの動作確認もした.無事に動くっぽい.とりあえず本日の走行距離200km.
- Comments: 0
- TrackBack (Close): -
実家に帰る
- 2010-07-30 (Fri)
- 一般
慣らし運転を兼ねて静岡県裾野市まで246のみで帰った.本日の走行距離120km.
東京脱出までの平均速度が12km/hとかいう自転車並みだったのは悲しい… 東京を抜けるまでは上手く道を選ぶ必要があるなぁ.何処が空いているのか試してみないと分からないのだけど.首都高だと信号無いけど…
- Comments: 0
- TrackBack (Close): -
納車だけど雨
- 2010-07-29 (Thu)
- 一般
まあ,土砂降りではなく小雨程度なので操作上は問題ないのだけど… コーティングがまだ安定化してないだろうからその点が気になる.土日にシャンプー洗浄しとくか.
それはさておき,適当に北に向かって帰ってきたら90kmも走ってた.まだまだ慣らし運転中なわけだけど,ぶっちゃけ高速道路を走らない限り大体4000回転強ぐらいまでで十分っぽい.なので普通に走ってるだけで慣らし運転な気がする.というか,人間側が機械に慣れるための慣らし運転ともいう.さっさと慣れよう.
- Comments: 0
- TrackBack (Close): -
ターミナルサーバクライアントでVNCを使いたかった(Ubuntu10.04)
- 2010-07-29 (Thu)
- ソフトウェア ( Linux/coLinux )
が,デフォルトだとVNCが選択できない.VNC使うには VNC のクライアントを入れておく必要がある(ただのGUIラッパーなのであたりまえだけど,RDPは入ってるのにVNCがないのは違和感).
sudo apt-get install vncviewer
うーむ,下らないことで時間食った.
- Comments: 0
- TrackBack (Close): -
家探し中
- 2010-07-28 (Wed)
- 一般
「やさがし」ではなく「いえさがし」で.
現在の住居の契約更新が来年頭にせまっている.今の場所にもだいぶ長いこといるので,バイク乗れるようになったことだし,どうせなら家賃の低い遠いところへお引越しでもしようかなと考え中.
が,ネットで検索する限りにおいて,中型のバイクを置ける物件が少ないという事態に嵌っている気がしなくもない.バイク置き場ありとかなってても原付のみOKとか地球ロックできませんとか….地球ロックできるバイク駐車場が近くにある物件探すのが良いのかなぁ.都合よく駐車場に空きがあるとかも難しい気がするけれど.
とりあえずまだ半年弱あるので不動産屋を色々回りつつ考えることにしよう.ぶっちゃけ雨の日の通勤経路と高速インターネットと安全なバイク置き場さえ確保されれば後はどうでも良い気がする.
- Comments: 0
- TrackBack (Close): -
悩みどころ
- 2010-07-27 (Tue)
- 一般
とある演算子に関して,適用順を変えると結果の値は異なるが,そのすべての結果は同値関係にある.こういう場合はその演算子を結合的って言ってもいいよなぁ.でも同値関係作るのに元の出力だけでは足りずに入力とのペアを出力にしないとならないとか面倒事はあるのだけど… とりあえず表記が汚い.
とかいうことを悩んでいた今日この頃.これで大昔に「適用例これしか無いんだよ,はっはっは」的だったものの二つ目の例ができるかもしれない.
- Comments: 0
- TrackBack (Close): -
免許更新
- 2010-07-26 (Mon)
- 一般
更新期限まで今日を含めて2日だったので江東運転免許試験場に行って免許を新しくしてきた.
Before: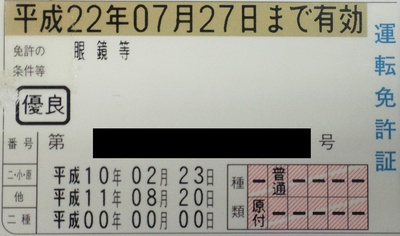
After: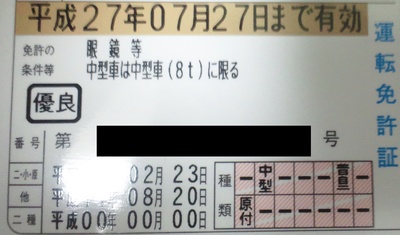
新しくなって,普通が中型になって普通自動二輪が増えた.自動二輪とろうかなぁとか去年から考えていたので更新を機にとってしまった.どうせ更新するなら一度にやってしまったほうが数千円浮くし講習(30分のビデオ)もいらないし.ということで,今回は追記もあったので免許試験場行きだった.平日だけとはいえ16:00まで受け付けれくれるのはありがたい.
メモ:試験場に入ってから出てくるまでで1時間くらい.更新だけだともっと短いかも? 学科免除で追記だったので,教習所でもらった用紙に写真(免許用ではない)貼って裏の病状等のチェックをして,そいつを卒業証書と旧免許と共に2番窓口に出して,ICカードの暗証番号発行して(2番窓口のすぐ横),視力検査して(7番窓口だっけ?),書類の何かのチェックをしてもらって(8番かな?),お金払って(4100円@0番窓口),再び2番窓口に戻ってきて書類渡して,名前呼ばれたら旧免許と引換券を貰って(2番で),写真とって(10番?),4階で1時間弱待機して(隣は食堂),免許もらったら本籍の確認をして,終了.
さて,これで免許は出来た.次はバイクの置き場所をどうにかせねば.近場のバイク用駐車場の空きは見つかってるからとりあえず引っ越すまでテンポラリでそこ借りるか.
- Comments: 0
- TrackBack (Close): -
早速バイク屋へ行って注文
- 2010-07-25 (Sun)
- 一般
昨日のうちに見積もりとっておいたのにETCを付けて注文.諸々入れて80万.車種は迷わずCB400SFで.乗りやすいとの評判だし渋い赤黒ツートンのが出てるし.そしてお店はホンダドリーム板橋.17号線を北に向かうだけで辿りつけるしHONDA専門店だし.
で,よく考えると… カメラ本体+レンズ4本の値段だよなぁ.何となくアホな買い物している気がしなくもない.だけどこの先最低でも10年は乗るつもりでいるので問題ない気になっておく.車検で定期的に状態回復しなければならないし長持ちするでしょう.目指せ10万キロ超え.
そういや実家に置いてあるKSRもメンテしたいなぁ…
- Comments: 0
- TrackBack (Close): -
卒検通過
- 2010-07-25 (Sun)
- 一般
緊張の所為か急制動で初めてのロック(と言っても一瞬滑っただけだけど).検定用の車体でエンジンが調子よくスピード出しすぎた&検定用の車体で後ろブレーキが死んでなくてよく効いた,というのを理由にしたい気もする.うーん,本番でミスるとは情けない…
が,それ以外は良く出来ましたと言われて無事通過.めでたし.今日は40人弱が検定を受けて30人強が合格してた.でも落ちた人は落ちた.自分落ちなくて良かったなぁ.そういや坂道でエンジンだけふかしてて進まなかった人たちは何だったのだろう? 坂道発進でニュートラルでしたとかか?
さて,今日は免許の書き換えできないので,明日のミーティング後にセンターへ行って更新予定.今日はとりあえず車体購入のための作業にとりかかる.
- Comments: 0
- TrackBack (Close): -
改行のみは空だった
- 2010-07-25 (Sun)
- プログラミング ( sed/wake/awk )
毎日朝から wake golf.納豆と味噌汁が美味い.でも流石に納豆ネコまんまはやりたくない.
そして,改行のみは空パターンにマッチ可能であったことに今更ながら気づいた.
-:\n \n :"Hello"
の出力は HelloHello になる.改行のみは空文字列だと思いたいことが時々あるので,これは便利かもしれない.first match なマッチング戦略なので,改行のみを空と思いたくなければその上にパターン用意しとけばいいし.
- Comments: 0
- TrackBack (Close): -
タクティクスオウガのリメイクが開発中だそうで
- 2010-07-24 (Sat)
- 一般
音速遅いけどさっき気づいた.
でもPSP持ってない… 海腹川背の例がある以上名作のPSP移植(リメイク)に期待が持てない…
しばらく見守ろう.よさげだったらPSP買う.
ところで,スクエニのEの字がcygwinの何かのアイコンにしか見えない気がしてきた.赤いcygwinアイコンって何に使われてたっけ?
- Comments: 0
- TrackBack (Close): -
第二段階みきわめ終了
- 2010-07-23 (Fri)
- 一般
今日は青5と青6で2時間走って終わり.
1時間目はUターンと乱れて置かれたパイロンスラロームとをやって,あとはいつものコースをくるくる.2車線使ったUターンは余裕だが,中央線よりから1車線幅のみでのUターンはしんどい.あとは半径小さく円を書き続けるの(エンドレスUターン)も速度と車体の倒し具合との感覚がまだ明確でないので難しかった.乱れたパイロンスラロームは教官のスピードには追いつけない.まあ,ぶつからず通過できりゃ問題ないわけだけど.
2時間目はみきわめだったので,ひたすらコースをくるくる.終わりが近づいてきたら苦手なものは何だと聞かれ,スラロームと答えて課題コースをくるくる.まだまだキビキビ感というかテンポが遅いというかなのだけど,とりあえず問題ないらしい.
んで,みきわめオッケーということで日曜日の卒業検定を申し込んで終了.雨降りそうなので急制動が恐い.
- Comments: 0
- TrackBack (Close): -
wake で golf して wake up な
- 2010-07-23 (Fri)
- プログラミング ( sed/wake/awk )
起きて朝飯食いながら wake golf して楽しく頭の体操.
最近気づいた wake golf で大事なこと:投げっぱなしジャーマン.
Haskell golf でも同じなのだけど,必要な出力が終わったらエラーで停止しても問題ないので,最後のエラー回避のためのコードは必要ない.エラーは投げっぱなしで.例えば,最後には空文字列になってしまうようなものはエラー回避に":"だけの行が必要となるが,こんなのは書くだけ無駄であると.
それに連動して,エラーで停止する前に必要な出力を負えなければならないので,string literal をアクションの前に置くようなスタイルにしておかないと投げっぱなしジャーマンできない(今のインタプリタがアクション部分を前方から処理してるから&多分make的にそういうセマンティクスだからだけど).
ということで,投げっぱなし Smileys Triangle.
:":\n:-":-)
.{1,65}:"\n$&"$&))
そして,sed の y コマンドのありがたみを感じる今日この頃.y のおかげで物事の大小比較が非常にコンパクトに書けていた気がする.今のところ wake で大小比較をコンパクトに実現する方法が思いついていないので,その辺をもっと修業しないとなかなかソート系に手が出ない.頑張ろう.
- Comments: 0
- TrackBack (Close): -
何故低速時のブレーキングに前ブレーキを使うと怒られるのか
- 2010-07-22 (Thu)
- 一般
理由:「後ろブレーキの方が効きが鈍いから安定して停まれるでしょ」
今日の1時間目は青4ゼッケンで,回避と経路設定といつものコース周回と.
で,低速時に前ブレーキをチョンッと使ってしまうくせについてまた注意を受ける.停止状態から2m進んで止まるだけに前ブレーキ使うな,後ろブレーキだけで十分だ,とか.ただ…,後ろで十分だからといって前を使ってはいけない理由になっていないわけで.まあ,積極的に使う理由もないのだけど.そして後ろブレーキで十分なら後ろブレーキの方が安定するというかスムーズというかカッコいいというかなのも納得出来る.
とはいえ,「後ろブレーキと前ブレーキで安全なのは後ろブレーキだ.何故なら後ろのほうが効きが鈍いからだ」ってのはどうなのだろうか? 重心の進行方向に対する力点とサスペンションの位置の違いのせいなんじゃないのかなぁとか.それを言っても肯定も否定もされず上の回答を頂いたのだけど… タイヤしか考えない状態でも前後のブレーキの効きが違うのかどうか私は把握していない.そして,仮にバイクを後ろ向きに走らせたなら,どちらのブレーキがより効くのだろうか? そしてどちらが安全なのだろうか?
もう一つ.色々邪魔が入るので直線で30km/h弱で走ったのだけど,出来るなら40km/h位の速度を出しなさいと言われた.まあ,交通を円滑にする必要があるのだから速度を出せるなら出すべきであるというその言葉には納得.が,その理由として「速度を出したほうが安定するんだから速度出せ」という言い方はどうなのだろうか? 20km/hも出ていれば十分安定して走行できる.故に安定のために40km/hを出せというのはおかしい.今ひとつ理路整然としない説明ばかりだったなぁという感想.
そういえば,コース周回中にすぐ後ろとかすぐ横を原付に乗って追っかけられたのだけど… 色々な点の確認だとは思うけれどそういうことするなら先に言っておいて欲しい.はっきり言って煽り耐性とか突然の危険への対処とかのテストかと思った.
ついでに,運転にはメリハリが大事だと言われたのだが,同様に指導にもメリハリは大事だよね,とか.常に淡々と同じ調子でしゃべるので,どれが重要なことなのかの重み付けが全く分からなかった.メリハリの利いた教官だとそこら辺が分かりやすくて安心なんだけどなぁ… とりあえず今日の人とは色々と相性良くなかった気がする.
その次の時間はセット教習で,シミュレータ+1時間の学科.危険な行動を取るNPCが沢山の世界を安全に動きまわるのが使命.でも1回死んだ! 左に停車中の車があり,対向車線には大きいトラックが来ていて,その右奥の小道から車が右折してきている,とかいう状況で右折車にあたった.ぶっちゃけ右奥の小道を認知していなかったのが原因.流石に道を認知していなかった以上,危険予測も何もあったものではない.事故の85%が認知に原因がある(他は判断ミスと操作ミス)ってのも非常に納得.ちなみに3人同時にシミュレータだったのだけど死んだの俺だけorz
さて,次回は青5でみきわめ一歩手前.スラロームとか一本道のバランス走行あたりかね.
- Comments: 0
- TrackBack (Close): -
wake で(ry その2
- 2010-07-22 (Thu)
- プログラミング ( sed/wake/awk )
wake がバージョンアップしてアクション部分でのエスケープが許可された.これは空白とか改行と入れるのに有効かなと.
ということで,ゴルフしたコードを書き換えた.ついでに,PCRE(ないしperl)の正規表現で^と$が文字列中のnewlineにどこでもマッチできることに気がついたので,それ関連で\nを置換しまくる.
char pyramid.前のは無駄ばかりだったけどだいぶすっきりした感じ.
:$< ([^ ]+)([^ ].*):$1\ $2 ( *)\S(.*):$1$2\ "$&\n" +:
swap lines.アクションのエスケープと正規表現の^とで縮めた結果,murky-satyrさんに追いついた.
-:$<\n (.+?)(^.+?\n)(.*):"$2$1"$3
追いつく前のは\nを付けるの面倒だなぁとかやってごちゃごちゃと:
-:$< (.*?\n)(.*?)(\n|\Z)(.*):"$2\n$1"$4
あとはもう少し複雑そうなのをということで Half Sierpinski をば.なんとなく同じパターンがたくさん現れるので(下のl関数とu関数)… そろそろ foldr とか map とかの高階関数が欲しくなってくるかなぁと思いつつ,実現すんのは(要素への区切り方というかリストの表現とかが結局)面倒だなぁとか思ってみたり.
-:$(x)
x:"#~"
c(.*?) *~(.*):"$1\n"c$2
.* {16}.:c$&
u(.*?)~(.*):"$1$(U$1)~"u$2
l(.*?)~(.*):"$1$1~"l$2
U.(.*):" "U$1
[A-z]*:
.+:$(l$&)$(u$&)
- Comments: 0
- TrackBack (Close): -
カーブと急制動
- 2010-07-21 (Wed)
- 一般
今日も物凄く暑かったけれど,1時間目は幸いにしてシミュレータ.街中走行で昼と夜と.教官との雑談により,第二段階からはMTとATの人を混ぜてシミュレータ教習していいと法で定められていると知る.実際,今日はATの人もいたので途中でガシャコンとシートを取り外してMT⇔ATの換装を目の前で見れた.無駄がなくていいねぇ.でもソフト面ではそのOSのサポート期限っていつ迄でしたっけとか聞いてみたかったな…
んで,2時間目は実車に乗ってカーブと急制動.カーブは時速30kmとかで曲がるのと,障害物を避けるのと,指定されたところで曲がっている途中で止まるのと.ぶっちゃけ最後のカーブ中に停車とかマジきつかった,不安定.障害物避けは,障害物がど真ん中に落ちていたのでカーブの内側に避けた.多くの人が外側に避けるらしいけどそんなもんなのだろうか? そして時速30kmでカーブは車体寝かせりゃ余裕なので問題なし.カーブ出口で時速40kmまで加速していたのは内緒.話によると,車体倒せなくて膨らんで外のパイロンへ激突という人がいるらしい.車体倒しすぎて滑ってく人はいたのだろうか? 急制動は第一段階から余裕だったので問題なし.心配があるとすれば雨降ったときにどうなるか分からないところ.
おまけで一本橋やってた感想:腕の力を抜く&ニーグリップ&姿勢を正す&半クラ&後ろブレーキ,という指示通りの状態をかけ合わせると時間が倍でもオッケーなくらい安定.腕の力抜くってのが意外と効く気がした.
そして次回は青4で何かを体験(多分指示に従って左右中央に移動して止めるヤツかね)らしい.
- Comments: 0
- TrackBack (Close): -
wake で(ry
- 2010-07-21 (Wed)
- プログラミング ( sed/wake/awk )
eval を使うようにしてみた.
char pyramid.eval 使って空白入れられるのね.
:$< ~:" " ([^ ]+)([^ ].*):$1$(~)$2 (.*)%:"$1\n" ( *)[^ ](.*):$1$2$(~) $&% +:
palindromize.eval を使うと評価位置を限定できるのでプログラムがすっきりする.
-:$< (.*)#.?\1(.*):"$2" (.)(.*#)(.*):$2$1$3 : ([^\n]+)(\n(.*))?:"$1$($1#)\n"$3
とりあえず,空白入れたり評価位置を特定するのにevalを使うということは理解した.
- Comments: 0
- TrackBack (Close): -
wake で遊び続けている
- 2010-07-21 (Wed)
- プログラミング ( sed/wake/awk )
なんか大昔に Makefile だけで n回Hello, world! をやった時を思い出すなぁ(make から呼べるコマンドは echo と make のみという縛りで,コマンドライン引数に n が指定される).
char pyramid.右辺で空白入りのトークンをどうやって作ればいいかわからず,とりあえずチルダをセパレータにしておいて最後に空白化している.無駄だ…
-:$< ([^~]+)([^~].*):$1~$2 (~*)[^~%]([^%]*):$1$2~ $&% ~+: ~(.*%):" "$1 (.)(.*%):"$1"$2 %:"\n"
Permutations.昨日のと同じ.これも最後の空白挿入の操作がお馬鹿なのでどうにかしたい.
:!012345% (.*)(!.*)(.)%(.*):$1$2%$3$4 $1$3$2$4% .*!%.+: (.)(.+!%):"$1 "$2 (.)!%:"$1\n"
palindromize.sed バージョンの移植.正規表現にターゲット全体をマッチさせるというのに慣れない.s コマンドののりで一部にマッチするパタンを書いてしまう.一度別のターゲットに分解してしまうと他のターゲットの情報を使えないので(evalを使えば結合できるから問題ない気がする),自分のプログラムだと全体をひとつのターゲットとして保持したまま一部を書き換えるということが多い.そこで前後の文脈部分のマッチを忘れて動かないとか叫ぶことしばしば.うーむ.eval の使い方を考えるか.
-:$< ([^\n%]+)(\n(.*))?:$1%$1# $3 (.*)%(.*)#.?\2(.*):"$1$3\n" (.*)%(.)(.*#)(.*):$1%$3$2$4
意外と仕様に合わせた出力のフォーマッティングが面倒な気がする.何かが分かっていないだけかもしれなけれど.
そして,さっき気づいたけど wake って googlability 低い名前だなぁ…
TODO: eval を使ったプログラミング作法を考える.
- Comments: 0
- TrackBack (Close): -
wake で遊ぶ
- 2010-07-20 (Tue)
- プログラミング ( sed/wake/awk )
shinhさんの作った言語 wake がゴルフ場に入ったので遊んでみたのだけど… まだ言語の癖が分かっておらずプログラム書くのが難しい.
とりあえず最初の方の問題の permutator を sed のプログラムから移植してみた.
元のsedプログラムはこんな感じ:
s/.*/:&%/ : s/\(.*\)\(:.*\)\(.\)%\(.*\)/\1\2%\3\4\n\1\3\2\4%/gm s/\(.*\):%$\|.*:%.\+\n/\1/gm t
で,移植したwake のプログラムはこんな感じ:
:!$<% (.*)(!.*)(.)%(.*):$1$2%$3$4 $1$3$2$4% .*!%.+: (.*)!%:"$1\n"
元のプログラムが s コマンドしか使っておらず,かつ,置換ができなくなるまで繰り返すだけなので,wake プログラムもほとんど同じ構造.s コマンドを明記しない分とエスケープが多く無いことなどによりコードサイズも縮んだ.
sed だとレコードの切れ目を改行で表現して m オプションで一気に処理するけれど,wake だと右辺のスペースでレコードぶった切って処理してあげる形になるのね.これに気づかず右辺に空白入れないとこうなる:
:!$<%~ ([^~]*)(![^~]*)([^~])%([^~]*)(.*):$1$2%$3$4~$1$3$2$4%$5 [^~]*!%[^~]+~(.*):$1 ([^~]*)!%~(.*):"$1\n"$2
全部に付いている (.*) が明らかに無駄.ここは別処理なのでスペースで切っておくべし.
嵌りどころ:空文字列をマッチしたグループを右辺にそのまま使用する場合,最初のルールに":$<"とか書いておくと無限ループする.
さて,次は何をやろうかね.
- Comments: 0
- TrackBack (Close): -
今日は1時間のみ
- 2010-07-20 (Tue)
- 一般
激烈に暑かった&人数多すぎたここ数回に比べて,今日は涼しげだったし人数少なくて良かった.でも今日は1時間しか予約取れなかったので(次のシミュレータの予約の関係で)1時間しか乗らなかった.
で,青2ゼッケンでBコースをぐるぐる.終わり際にAコースに切替指示→コース間違う.そして,見通しの悪い交差点はあからさまなぐらいに注意して(左右確認して)よろしいと.最近は確認が甘くなっていたので叱られた.残り4時間はあからさまに注意する方向で頑張る.あとは,微妙な速度調整に前ブレーキをちょんっとかける癖があるのだけど,それを後ろブレーキでやればもっと安定して減速できるよと指摘を受けた.まあ,気をつけられたら気をつけたい.
そして気になってたクランクの不安定さだけど,視線を遠くの行き先に置くようにしつつ速度を上げたら安定した.
次はシミュレータで何かやって,それから青3へ.
- Comments: 0
- TrackBack (Close): -
NEX用のキャリングケースが届く
2週間前に注文しておいた SONY "α"NEX用キャリングケース SNAP の Type-A が届いた.ハンドメイドなので2週間かかるのはしょうがない.なんとなく便利そうだったのでオプションのベルトループ取り付けで注文した(SNAPじゃない方はこのオプションが無い).
ちょうどぴったりサイズで良い感じ.大体満足.ストラップが微妙に邪魔だなぁと思わなくない.
- Comments: 0
- TrackBack (Close): -
とりあえず第二段階へ
- 2010-07-19 (Mon)
- 一般
今日のゼッケンはみきわめの赤5と第二段階初回の青1.
で,第一段階のみきわめ.コースを何週かして,そのうち課題コースに移って何週かして終了.ポイントポイントに教官がいてて確認をしていたらしい.とりあえずスラロームはアクセルの開きを大きく時間を短くすると上手くいく.クランクは目線に気をつければ問題ない.左に曲がるときに先の方を見ておけばコケはしない.速度遅すぎるよと何度か言われた気がするけれど…
二時間目は長めのコースを回りつつウィンカーのを正しく使いましょうとか正しく停止しましょうとか.ぶっちゃけ一度コース間違えた気がする(ショートカットした).注意されなかったのでよしとしよう.
次は青2らしい.
車体メモ:12号車は吹けが悪いかつ後輪ブレーキ鳴きまくり.26号車はピーキーなのが治ってて普通だった.
- Comments: 0
- TrackBack (Close): -
面白いレポート
- 2010-07-19 (Mon)
- 一般
1. 出題者の想定を超えたレベルで仕事(課題設定,考察)がしてある.思わず唸る.勉強になります.
2. 「この回答が出たら最高点あげるよ,無理だろうけど」とか思っていた回答にたどり着いている.マジで感心.誰も答えてくれないより面白い.
3. できなかった挑戦課題に対して「できませんでした(>_<)」と書いてある.悩んだ感が伝わってくるねぇ.
番外編.挑戦課題に「ムリ orz」はもうひと捻りないと面白くない.
そして min演算子とplus演算子からなる半環に tropical semiring という名前がついているとか初めて知った.さらに,何でもかんでも0にしてしまう単行演算子(閉包演算子)を付け加えるとKleene代数にもなってくれると.「tropical semiring kleene algebra」でググッて出てくるGeorg Struth氏の資料がわかりやすそう.
- Comments: 0
- TrackBack (Close): -
Colemak 配列でも履修しようかな
- 2010-07-18 (Sun)
- 一般
そろそろ第三のキーボード配列を履修したいかなぁと思って調べてみると http://colemak.com/ に Colemak 配列が第三の配列だと書いてある.QWERTYと同じ部分(ショートカットキー変えないため?)を残しつつDVORAKの効率性があるらしい.
QWERTYとの共通部分のせいでかえって履修しにくいのかもなぁと思う今日このごろ.DVORAKは何ヶ月かかったけ?
- Comments: 0
- TrackBack (Close): -
カードが見つからず焦る
- 2010-07-18 (Sun)
- 一般
教習所についたらカードが見つからない.カード無いと配車券出せない→今日は無駄?
で,荷物ひっくり返したり落とし物で届いてないか受付で聞いたりしても見つからず… 配車券はカード無くても出してあげるよと言われたのでとりあえずまあいいやと.そう思って論文読もうと論文の束を取り出して目的の論文探してたらカードが落ちてきた.うーん,上手くはまっててゆすっても出てこなかったらしい.なんのこっちゃ.
それはさておき,今日はゼッケン赤3と赤4.前回の赤2の課題の確認とクランク&8の字で.
とりあえず,スラロームは車体倒し過ぎとか言われたので修正.一本橋は粘り過ぎと言われたので修正.
クランクも粘って半クラでトロトロやってたので何度か足ついた気がする.基本的に,左に曲がるときには内寄りを回るとか考えてしまうのが良くない気がする.楽に外回れと言われた.次回気をつける.8の字とS字は素通りで.
次は赤5でみきわめ.なにをみきわめるのかよく分からないのが難しい.
車体メモ:今日の26号車はピーキー,24号車は普通かな.
- Comments: 0
- TrackBack (Close): -
くだらないこと
- 2010-07-17 (Sat)
- 一般
DCTというと
Discrete Cosine Transform
Dual Clutch Transmission
DREAMS COME TRUE
とか.最後はどうでも良いとして,デュアルクラッチもDCTだったのか.
- Comments: 0
- TrackBack (Close): -
ただ停まるだけでよかったんかい
- 2010-07-17 (Sat)
- 一般
一限目,赤2ゼッケンで課題コース回る.坂道発進は問題ない.何も考えなければ上手くいく.スラロームは… MTなので車体を倒しやすいのだけど,アクセルの開きが足りなくて車体を起こしきれなかった時のフォローがよく分からない.もう一度開けば立て直せるが,スピード付き過ぎて大回りとか.ブレーキ使えばよいかね.一本橋は落ちた記憶がない.後ろブレーキ使っていいなら楽にトロトロ渡れるので,後ろブレーキ使わずに半クラのみでトロトロ渡る練習とかしてた気がする.どうも変なくせがついていて,半クラ固定のままアクセル操作してる気がする.逆にしないとダメだろう.そして問題の急制動.第一段階は40キロから普通に停まるだけで良いらしい.が,短い距離で停まるのが正義だと思い込んでブレーキ強めにかけていたら,ブレーキ強すぎて危ないと叱られた.あと,止まると分かっているときには左足が勝手にシフトダウンをしてしまう(いきなり止まらなければならない状況ならシフトダウンなんかしないのだけど… 実際,次のシミュレータで突然障害物が出たときにはシフトダウンなんかせずに停止しているし).急制動のところではシフトダウンしちゃダメと意識改革が必要.ということで,3回ないし4回くらい急制動のところで叱られた気がする.難しい.
そういや今日乗ったバイクは1速からニュートラルに入りやすかったなぁ.2速に変えようと思ったけど入らなかったのが3回くらいあった.初回のヤツとはえらい違いで.でも車台番号忘れた.
二時限目,シミュレータ1回目.雨の路面で滑りましょうとか,マンホールで滑りましょうとか,風に流されましょうとか.シミュレータだと自身に加速が働かないので加速具合と現在の速度の推定が難しい.そして風に流される場面での横からの力がどの程度の風速とかを想定しているものなのかを聞いてみたけれど,車種にも依存するしよく分からないとの回答.まあ,そうだよね…
次は赤3のゼッケンらしい.練習と確認とか言ってたので,下手なことをすると時間が伸びてしまう.余裕のないスケジュールなので根性で乗り切ろう.
- Comments: 0
- TrackBack (Close): -
オートマ恐い
- 2010-07-16 (Fri)
- 一般
今日は,黄色2のゼッケン.最初の1時間はクルクル周回して終了.何となくエンジンブレーキ使いたい気分らしく,停止前に2速から1速に落としたときにクラッチを繋げてしまうのを注意される.止まるときはエンジンブレーキ使おうと思わない方が安全.あとは左折で膨らまないようにとか考えてたら小回りしすぎて縁石にスった気がする.気をつけましょう.
次いで2時間目にオートマ体験.
つーかスクーターでかいし重いし安定して座れないし遠心クラッチは反応鈍いし恐いことだらけ.原付でもスクーター恐いのに…
んで,前半はコースをクルクルまわってて,後半はスラロームとか坂道発進とか一本橋とか.左手の後ろブレーキを半分かけつつアクセルふかしておくと安定することを学んだ.オートマ版の半クラよね.まあ,もう二度とオートマのらないと思うけど(大型取りに行くならもう一度あるのか?).
そして一本橋に何秒乗っていられたのかよく分からない.とどのつまり,秒数を数える余裕が無い.うーん…
そしてスラロームもパイロンに当たりはしないけれどメリハリが無い.もっと車体を傾けたいところだけどスクーターだと滑り落ちそうで恐い.うーん…
さて,次回は赤2でマニュアルに戻って一本橋とか急制動とかスラロームとか.
- Comments: 0
- TrackBack (Close): -
Machine Learning に関するアルゴリズムの MapReduce 実装とか調べた
- 2010-07-16 (Fri)
- 一般
というか,まんまな論文があったので読んでみた.
結論:GroupByKey演算いらない問題しか扱っていない.バッグ上の準同型(リダクション演算子は加算限定)でしかない.だけど"the summation form"とか名前をつけてしまっている.
この分野でよく扱われている計算10個の並列化の仕方をコメントして(つまりは彼らのいうsummation formがあるよねと言って),実験結果を示しているのだけど,実際にやられていることは非常に単純.データ量が大量にありすぎるだけなので,それを分散して map と sum を並列化したらバンザイ.残りの部分は興味のある特徴量の次元数(データ量に比べて非常に小さい)にしか依存しないから並列化しなくていいよね,と.
著者らも,別に新しい速い並列プログラム(アルゴリズム)つくったわけでなくて簡単に書ける枠組みを考えたんだよ,という言い方をしている.その枠組が新しいか否かはなんともいえないが…
とはいえ,この単純なパタンで書けちゃうけど良く使われる計算10個,というものをまとめたことには大きな価値があるかなと.我々の得意とする並列計算パタンで計算できる重要な計算問題のサーベイの手間が省けるから.
どうでもいいけど K-means に hard と soft があったとは知らんかった.
さて,次はどの辺を調べようか? できればGBK演算が本質である例を見つけたいのだけど…
- Comments: 0
- TrackBack (Close): -
癖の矯正は新しいことを身につけるより大変
- 2010-07-15 (Thu)
- 一般
教習車はCB400SFなわけだがKSR-Iに比べるとアホみたいに重い.力技ではどうにもならんということは良くわかった.面倒なので絶対にこかさないことを心に誓う.
そして癖をどうにかするのが課題という.動かすこと自体はあまり問題ないのだが…
癖1:レバーの握りとか.加速して2速に入れたときにクラッチレバーに指を添えたままになってしまう.2速の後には3速が待っている,という頭なのだけど3速に入れるなと指示されとるので指だけ残るという… 4回くらい連続で注意されたので直ってきただろうか? そして4本で握るというのもなかなか慣れない.3本くらいで
癖2:カーブで速度出しすぎらしい.カーブを2速のアクセル全閉で曲がるのに違和感があるのだけど400ccでパワーあるし教習所内なのでそんなんで良いのかもしれない.初回だからかもしれないけれど.
癖3:短い直線だけど3速に入れようとしたり長めの直線で4速入れようとしたり… パワーのない原付の感覚がベースなのでさっさとギア上げたくなるけど400ccならそんなことせんでもエンジン働いてくれるという.
癖4:腕の力でどうにかしようとしてしまう.足で支えろと.手の力抜けと.内腿微妙に痛いかも…
とりあえず他には,右足はとりあえずフットブレーキ踏んどけ,サイドスタンドかけたら左にハンドル切れ,乗り降りとかセンタースタンド外すときには右にハンドル切れ,前に座れ,つーかカーブ手前はエンジンブレーキだけでなく普通のブレーキも使え,右足付くときは後確認しろ,あたりに気をつけなければならない.
そういや1速からニュートラルに入れようとしても2速に入ってしまう現象に悩まされたっけ.力加減がかなりシビアだった気がする.途中からは2速からニュートラルに入れるほうが簡単であることに気づいてそうしてたけれど.
次回は黄色2のゼッケンで.黄色は危険の印.
- Comments: 0
- TrackBack (Close): -
ランダマイズドな近似アルゴリズムに関する論文は読みにくい
- 2010-07-15 (Thu)
- 一般
ランダマイズドアルゴリズムや近似アルゴリズムには,平均の計算量とか近似比とかをコントロールする為のパラメータが含まれる.そして,多くの場合,ランダム選択のための確率や条件分岐の条件には,そのパラメータの一見して意味不明な多項式とかが大量に出てくる.基本的にこれらの式の形の複雑さは,計算量とかの保証のために証明上都合の良いしきい値を取っていることに起因する.そのため,アルゴリズム中のパラメータによる判定式が何の目的でその形をしているのかは証明を詳しく追わないと理解出来ない.とどのつまり,直感が働かないのでアルゴリズムの本質がなんなのか一見しただけではわからない(論文の本文中に説明があれば別なのだけど,紙面の都合上,そこまで親切にするのは難しいのでしょう).
ということで,Max-cover を解くためのランダマイズド近似並列アルゴリズムの論文読むのに二日かかった.MapReduce使えるとか言っているのを確かめたかっただけなので,そこまで細かく読む必要はなかったかもしれない.
そしてこいつは GroupByKey によって,「集合→含まれる要素達」という関係と「要素→それを含む集合達」という関係とをスイッチングするのがキモらしい.ということで,こういった視点の切り替えが必要な集合上のアルゴリズムならGBK演算が必要といえそう.他にっどんな問題があるのか良く解らんけど.
とりあえず Set-cover と Weighted Max-cover と BudgetありMax-cover も同じで動くでしょう.Set-cover はもっと単純かもしれんけど.
- Comments: 0
- TrackBack (Close): -
何かを思い立つ
- 2010-07-14 (Wed)
- 一般
免許の更新期限まであと2週間.自動二輪の免許を最速で取るのも2週間.やることはひとつ.
ということで,自動二輪の免許を取りに教習所に行くことにした.虹色のとこ.受付のお姉さんに技能予約を無理矢理突っ込んでもらったりして,規定通りに行けば免許の更新が一回で済む予定.さてどうなることやら.
そして,前に使ってたヘルメットは実家に置きっぱなしなので,新しくSHOEIのMultitecを買った(前のはAraiの何か).かぶると丁度良いフィット感なのだけど,まだ新しいせいなのか脱ぐ時に耳たぶが変に引っかかって痛い.そのうち慣れるといいなぁ.
- Comments: 0
- TrackBack (Close): -
プリンタをエラー状態に追い込む論文
- 2010-07-14 (Wed)
- 一般
とある論文のPDFをLinuxから印刷しようとしたら,送りつけた色々なPSプリンタがエラー状態に追い込まれて印刷できなかった.Windows側からやったら問題なかったので,Linux側のGhostscriptとかの辺りで何かがおかしかったのかもしれないけど… よくわからん.
- Comments: 0
- TrackBack (Close): -
梅雨の時期になると溜まるもの
- 2010-07-13 (Tue)
- 一般
雑誌とダンボール.
濡れた紙とか微妙すぎるので雨降ってるとゴミに出す気になれない.
来週にはゴミに出せるといいなぁ.
- Comments: 0
- TrackBack (Close): -
工事した
- 2010-07-13 (Tue)
- 一般
棚を壁にくっつけてもらいましたとさ.これで文句なかろう.
それにしても現場に来た方と受付の事務の方とで情報がうまく伝わっていなかったり現場に見積りに来たのに施工箇所を間違っていたり微妙にハズレ感が漂っていたのだけど… とりあえず物はちゃんと固定されているので問題なかろう.
- Comments: 0
- TrackBack (Close): -
価格で千円ずれると買う気になるの法則
- 2010-07-12 (Mon)
- 一般
価格=「kakaku」,千円=「k」,ずらすと「kakkau」で「かっ買う!」.
「価格」と打とうとしてミスって「かっ買う」になっちゃって微妙に面白かったのでその下らなさをメモっておく.
- Comments: 0
- TrackBack (Close): -
テレビをドナドナ
- 2010-07-11 (Sun)
- 一般
アナログしか映らない21インチブラウン管のテレビとお別れした.無料回収ドットコム に電話したら1時間くらいで回収に来てくれて,集荷料金1500円のみで処分完了.きっと安いに違いない.
さて,次は溜まった漫画雑誌でも縛り上げるか.
- Comments: 0
- TrackBack (Close): -
Nucleus のバージョンアップ
- 2010-07-10 (Sat)
- ソフトウェア
3.3Xja から 3.41ja に置き換えた.見た目あまり変わらず.管理画面の色が淡くなっただけのような気がする.
とりあえずちゃんと動くか確認.
- Comments: 0
- TrackBack (Close): -
ノータッチ傘
- 2010-07-09 (Fri)
- 一般
タッチしなくても開く傘.ワンタッチなんて古い.
…
研究室は壊れた傘置き場ではありませんよ?
- Comments: 0
- TrackBack (Close): -
朝晴れたので不忍池によってきた
ハスがちらほら.咲いてる花の数よりカメラマンの数のほうが多かったかもしれない程度だけど.

NEX-5の液晶が結構細かいのでMFアシストなしでもそれなりにピントが合わせやすい.なんとなくMFアシストいらない気分になってきた.シャッター半押しのままMFアシスト使ってx14倍とかやろうとすると結構指が大変なことになるし… ソフトウェアボタンの割当変更か拡大率とフレーム位置の記憶が出来るとよいのだけど.
- Comments: 0
- TrackBack (Close): -
Lucid の dvipsk-ja
- 2010-07-07 (Wed)
- ソフトウェア ( Linux/coLinux )
放置したままだったけど講義資料日本語で作るのでそろそろ入れようかと.
が,本家の方は更新されないみたいなのでPPAで公開されているパッケージを使うことにした.ぶっちゃけ以下の3行実行するだけ.ppaの登録も簡単になったもんだなぁ.
sudo add-apt-repository ppa:cosmos-door/dvipsk-ja sudo apt-get update sudo apt-get install dvipsk-ja
そしてちゃんと日本語psにコンパイルできた.パッケージ作者に感謝.
- Comments: 0
- TrackBack (Close): -
一次分数変換
- 2010-07-06 (Tue)
- 一般
一次分数変換ってコンテキスト閉じるんだなぁ,と.そして2x2の正則行列の群と同型なのね(厳密には,一次分数変換の4つのパラメータを同時に定数倍しても同じ変換なので,複数の分数式が同じ変換を表現する.故に,変換の群と同型なのは2x2の射影行列の群).大昔に講義でやったけど名前が出てこなかったのはご愛嬌.
そしてコンテキストが閉じるなら並列化できる! 三重対角のLU分解が並列化できるのは自明!
とかいうことを叫んでいたのだが,これって結局,変換の群を別の計算可能である同型な群にマッピングして計算してるってことよね.とか考えると,Context preservation ってこの解釈系の群を(適当な拡張を経て)構成する手法なのよねとか.解釈系が既知の効率の良い群に落ちてくれる例って他にないのかしら?
- Comments: 0
- TrackBack (Close): -
明日の準備した
- 2010-07-05 (Mon)
- 一般
なんとなく皆発表当日にスライドを送るので反抗して前日に送り付けてみた.余裕大事.
- Comments: 0
- TrackBack (Close): -
ゆうぱっくの遅延に巻き込まれてた気がする
- 2010-07-04 (Sun)
- 一般
金曜日に時間帯指定で到着するはずだった荷物が正しく届かなかったのはこのせいなのかもしれない… 大した問題ではなけれど.
- Comments: 0
- TrackBack (Close): -
そろそろ不忍池のハスが咲き始めるかなぁと
思ったので行ってみた.
とりあえず,当然のごとく全体的にはまだまだ緑一色.葉っぱの背丈もまだ低い.
早咲きの弁天堂裏のボート乗り場の前.こっちは既に点々と咲いていた.早朝ならもう少しひらいているのがいたかもしれない.

ほか,早めに咲く南西端のところも幾つか花が付いていた.昼ごろだったので既に閉じていたけれど.
そういや不忍池の周辺って紫陽花も沢山咲いてたんだなぁ.余計な邪魔物が視界に入りまくるので認知外だったけれど.
- Comments: 0
- TrackBack (Close): -
NEX-5のファームアップ
無事修了.電源切っておくだけで電池を無茶苦茶に消費する問題はどうにかなったのだろうか? 一度しか遭遇したことない問題だけど,さて撮るかって時にバッテリーなくなってると精神的ダメージでかいからなぁ.
それはさておき,バージョン情報をよく見てみたら「本体」と「レンズ/マウントアダプタ」の二つのバージョンがあることに気づいた.これってマウントアダプタのファームもバージョンアップ出来るってことなのかな? ファームウェアのバージョナップでSSM/SAMのオートフォーカスができるようになると良いなぁ.とはいえ持ってるレンズでSSM/SAMなのは1本しかないのだけど.フォーカス駆動用のモータ突っ込んだマウントアダプタでないかなぁ…
どうでもいいけど SSM も SAM もミサイルだよなぁ.地(艦)対地(艦)ミサイルと地(艦)対空ミサイルで.SAM付きのレンズで飛行機撮るとかネタでしかない.
- Comments: 0
- TrackBack (Close): -
ICPC国内予選だったようで
- 2010-07-02 (Fri)
- 一般
最初の3問は余裕で解いて4問目に何処へ行くか悩む問題セットだったかなと.まあ,ただの監督であった私には関係ないが.
とりあえず6問解いたチームすごいねぇ.俺等んときには4問(早く)解けたらアジア予選行きだったのに.そして密かに高専チームが増えているのは喜ばしい.もっと出れ.
- Comments: 0
- TrackBack (Close): -